Des chercheurs de l’Université de Cambridge ont mis au point une main robotique peu coûteuse et économe en énergie capable de saisir divers objets en utilisant le mouvement passif de son poignet et des capteurs tactiles sur sa « peau ». Cette innovation, publiée dans la revue Advanced Intelligent Systems, répond aux défis auxquels sont confrontés les robots dans la manipulation d’objets de différentes tailles, formes et textures.
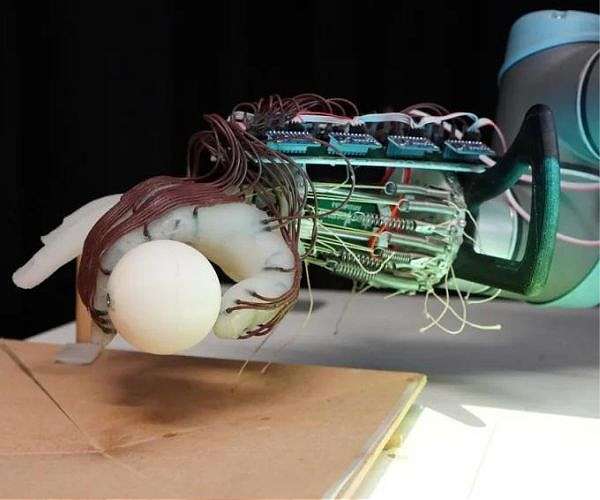
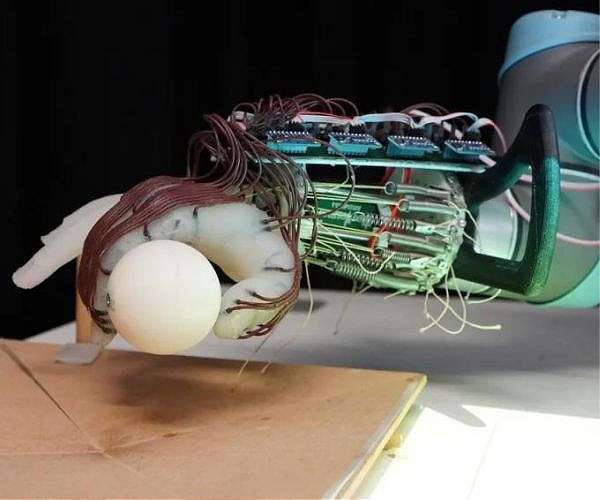
La main de robot imprimée en 3D, conçue par le laboratoire de robotique bio-inspirée du professeur Fumiya Iida, utilise une petite quantité d’énergie pour imiter les mouvements de la main humaine sans avoir besoin de doigts entièrement motorisés. La main est implantée avec des capteurs tactiles, ce qui lui permet de détecter l’objet qu’elle touche et peut prédire si elle laissera tomber des objets en fonction des données du capteur.
Essais réussis
Au cours de plus de 1200 tests, la main du robot a démontré sa capacité à saisir 11 objets sur 14, dont une pêche, une souris d’ordinateur et un rouleau de papier bulle. La conception passive est plus facile à contrôler, offre une large gamme de mouvements et simplifie le processus d’apprentissage.
« Dans des expériences antérieures, notre laboratoire a montré qu’il est possible d’obtenir une amplitude de mouvement significative dans une main de robot simplement en déplaçant le poignet », a déclaré le Dr Thomas George-Thuruthel, co-auteur de l’article.
« Nous voulions voir si une main de robot basée sur le mouvement passif pouvait non seulement saisir des objets, mais serait capable de prédire si elle allait laisser tomber les objets ou non, et s’adapter en conséquence. »
Mouvement naturel
Cette percée pourrait ouvrir la voie au développement d’une robotique abordable avec un mouvement naturel et une adaptabilité. Les extensions futures pourraient inclure des capacités de vision par ordinateur ou apprendre au robot à exploiter son environnement pour saisir une plus large gamme d’objets. Le projet a été financé par UK Research and Innovation (UKRI) et Arm Ltd.
Vous pouvez trouver le document de recherche intitulé « Apprentissage prédictif de la récupération d’erreur avec une main anthropomorphique douce basée sur la passivité sensorielle » sur ce lien.
Venez nous faire part de vos impressions sur notre Facebook, Twitteret LinkedIn, et n’oubliez pas de vous inscrire à notre newsletter hebdomadaire sur la fabrication additive pour recevoir toutes les dernières histoires directement dans votre boîte de réception.
