Les scientifiques du MIT recherchent de nouvelles façons d’améliorer les systèmes automatisés, décrivant leurs résultats dans lePlanification évolutive et probabiliste complète de l’extrusion spatiale robotisée. ’En explorant de nouvelles façons d’intégrer la robotique dans la production, les auteurs ont créé un nouveau concept d’extrusion spatiale robotique, accompagné d’algorithmes de planification complets.
En se concentrant sur une alternative à la méthode de stratification d’impression 3D traditionnelle, les chercheurs ont cherché à surmonter les défis actuels de l’extrusion robotique tels que les contraintes géométriques de collision et cinématiques, ainsi que les contraintes de rigidité. Cette méthode n’a été utilisée que dans des mesures limitées, que les chercheurs attribuent aux contraintes de planification lors de constructions plus importantes.
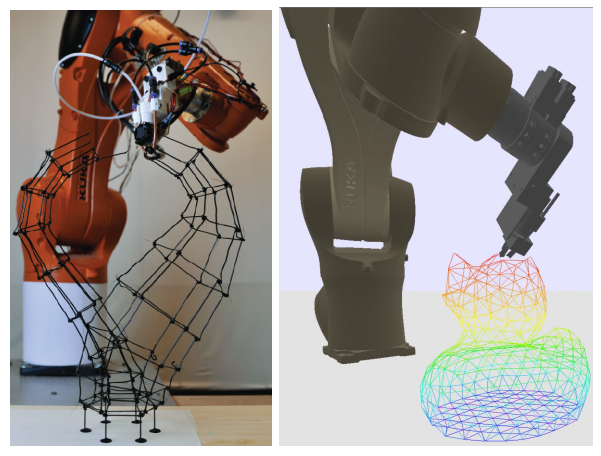
À gauche: bouteille Klein (246 éléments). Droite: canard (909 éléments).
L’algorithme créé pour cette étude est basé sur une forme mathématique, permettant à l’équipe de recherche de connecter «des contraintes géométriques et structurelles satisfaisantes», car la rigidité est critique dans la construction au départ, avec des collisions limitant les actions à la fin. Les formules mathématiques sont destinées à planifier à la fois la rigidité et les contraintes géométriques, «en effectuant globalement une recherche en arrière gourmande, en utilisant un raisonnement en avant pour biaiser la recherche vers des structures rigides».
Les scientifiques ont commencé des formulations sans robot présent, créant une structure de trame avec un graphe géométrique non dirigé hN, Ei intégré dans R 3:
« Soit les sommets du graphe N appelés nœuds et les arêtes du graphe les éléments E ⊆ N2 où m = | E |. Chaque nœud n ∈ N est le point de connexion d’un ou plusieurs éléments à la position pn ∈ R 3. Chaque élément e = {n, n0} ∈ E occupe un volume à l’intérieur de R 3 correspondant à un cylindre de révolution autour du segment de ligne droite pn → pn0. Un sous-ensemble des nœuds G ⊆ N est fixé rigidement au sol et subit ainsi une force de réaction. »
«Chaque élément e = {n, n0} peut être extrudé à partir de n → n 0 ou n 0 → n. Soit l’élément dirigé ~ e = hn, n0 i désigne l’élément extrudant e = {n, n0} à partir de n → n 0. Nous utiliserons l’ensemble P ⊆ E pour faire référence à un ensemble d’éléments imprimés, représentant une structure partiellement extrudée. Soit NP = G ∪ {n, n0 | {n, n0} ∈ P} ⊆ N soit l’ensemble des nœuds enjambés par les nœuds au sol G et les éléments P. La planification de l’extrusion nécessite d’abord de trouver une séquence d’extrusion, un ordre des éléments dirigés ψ ~ = [~e1, …, ~em]. Nous utiliserons ψ pour désigner la version non dirigée de ψ ~. Soit ψ ~ 1: i = [~e1, …, ~ei ] donner les premiers i éléments de ψ ~ où i ≤ m. »
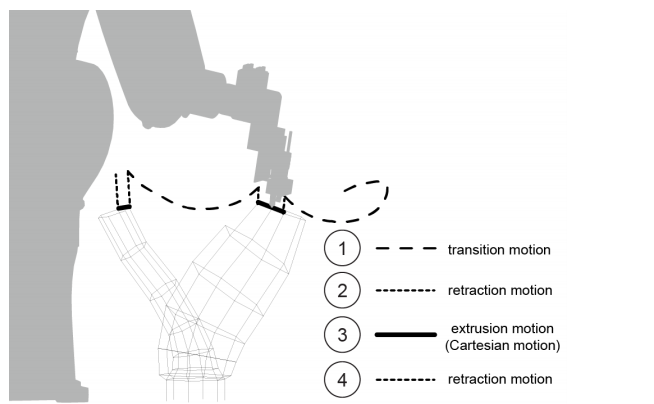
Mouvements de transition, de rétraction et d’extrusion pour deux éléments.
La planification de l’extrusion devait être complétée par un robot manipulateur articulé respectant les limites des articulations et évitant les collisions avec lui-même, l’environnement et les éléments qui viennent d’être imprimés.
« Soit Q: P → Q une fonction qui mappe un ensemble d’éléments imprimés P ⊆ E à l’espace de configuration sans collision du robot Q (P) ⊆ Q. Quand aucun élément n’a été imprimé, Q (∅) est le espace de configuration sans collision du robot lorsque l’on considère uniquement les collisions d’environnement, les auto-collisions et les limites des articulations. Chaque élément supplémentaire imprimé diminue légèrement l’espace de configuration sans collision… »
Les auteurs ont travaillé sur 41 problèmes d’extrusion différents dans cette étude, comprenant jusqu’à 909 éléments et des combinaisons des algorithmes PROGRESSION, FORWARDCHECK et REGRESSION, ainsi que quatre heuristiques: Random, EuclideanDist, GraphDist et StiffPlan. Quatre essais ont été effectués pour chaque algorithme, avec des délais d’attente d’une heure.
PyBullet a aidé à la vérification des collisions, à la cinématique avant et au rendu. Les structures ont été prétraitées en utilisant une hiérarchie de volume limite (BVH) de boîte de délimitation alignée sur l’axe statique (AABB) avec chaque lien de robot, puis les solutions suivantes ont été utilisées:
- PLANMOTION utilisant RRT-Connect
- SAMPLEIK utilisant IKFast
- PLANCONSTRAINED utilisant Randomized Gradient Descent (RGD)

De gauche à droite: 1) la sous-structure non affectée au premier état où REGRESSION-Aléatoire backtracks. 2) le premier état où REGRESSION-EuclideanDist backtracks. La déflexion de l’élément est colorée du blanc au rose. Les cinq nœuds les plus déformés sont rouges et leurs déplacements translationnels sont annotés en mètres 3) le premier état où REGRESSION-GraphDist backtracks 4) REGRESSION-StiffPlan trouve une solution sans retour en arrière.
Les algorithmes PROGRESSION et REGRESSION ont présenté des performances améliorées, montrant que l’heuristique offrait une rigidité et un guidage géométrique. FORWARDCHECK a offert une meilleure précision pour la résolution de problèmes que PROGRESSION, « indiquant qu’il est capable d’éviter certaines impasses. » En fin de compte cependant, les chercheurs ont noté que REGRESSION était le plus performant par rapport aux autres, brillant à la fois en taux de réussite Durée. Les algorithmes les plus performants ont résolu 92% des problèmes, avec un temps d’exécution moyen d’environ 15 minutes.
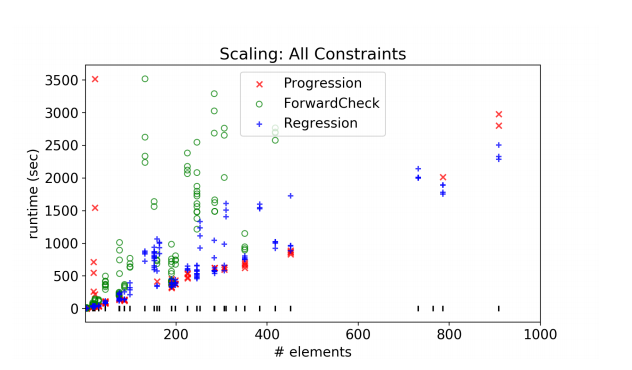
Le temps d’exécution de chaque algorithme lors de l’utilisation de l’heuristique EuclideanDist. Les graduations de l’axe x indiquent la distribution des tailles de problème.
«Nous avons expérimenté deux problèmes d’extrusion envisagés par Choreo. Choreo résout les problèmes «3D Voronoi» et «Topopt beam (small)» en 4025 et 3599 secondes alors que REGRESSION-EuclideanDist résout les problèmes en 742 et 2032 secondes. Notre planificateur surpasse Choreo malgré le fait que Choreo ait eu accès à des informations supplémentaires spécifiées par l’homme (section II). Nous avons validé notre approche sur trois problèmes d’extrusion réels. La plus grande des trois est la bouteille Klein, qui a pris environ 10 minutes à planifier et 6 heures à imprimer.
«Les travaux futurs impliquent d’étendre notre approche aux tâches de construction à usage général», ont conclu les chercheurs.
Les systèmes automatisés et les robots continuent de jouer un rôle important dans le monde de l’impression 3D, de l’expérimentation avec des microrobots aux projets en cours de la NASA aux études destinées à améliorer l’évolutivité. Que pensez-vous de cette nouvelle? Faites-nous part de vos pensées! Rejoignez la discussion sur ce sujet et d’autres sujets sur l’impression 3D sur 3DPrintBoard.com.
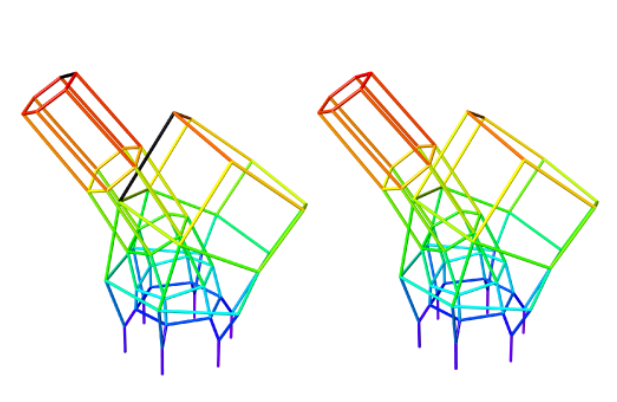
Gauche: Le premier état où PROGRESSION-EuclideanDist revient en arrière (les éléments noirs ne sont pas imprimés). Droite: REGRESSION-EuclideanDist trouve une solution sans retour en arrière.
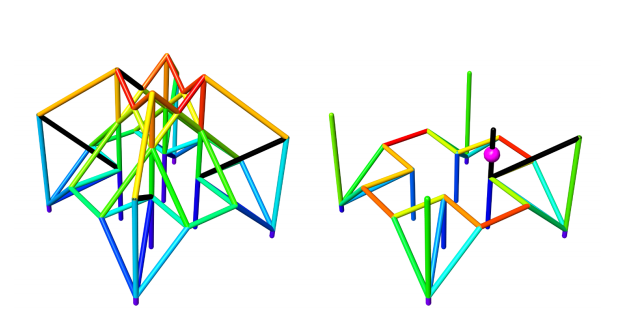
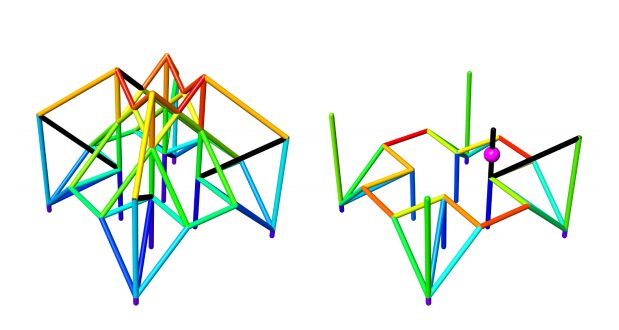
Gauche: le premier état où PROGRESSION-GraphDist revient en arrière (les éléments noirs ne sont pas imprimés). À droite: FORWARDCHECK détecte que l’impression de l’élément indiqué par la sphère rose empêche l’élément noir diagonal d’être extrudable en toute sécurité.
[Source/Images:‘[Source/Images:‘Planification évolutive et probabiliste complète de l’extrusion spatiale robotisée’]
